We show comparison of predicted and ground truth pose and predicted and ground truth extrinsic contact estimates from tactile only feedback. The results indicate that the contacts are utilized by our proposed framework to narrow down and disambiguate the local tactile feedback, yielding highly accurate predictions.
Method Overview
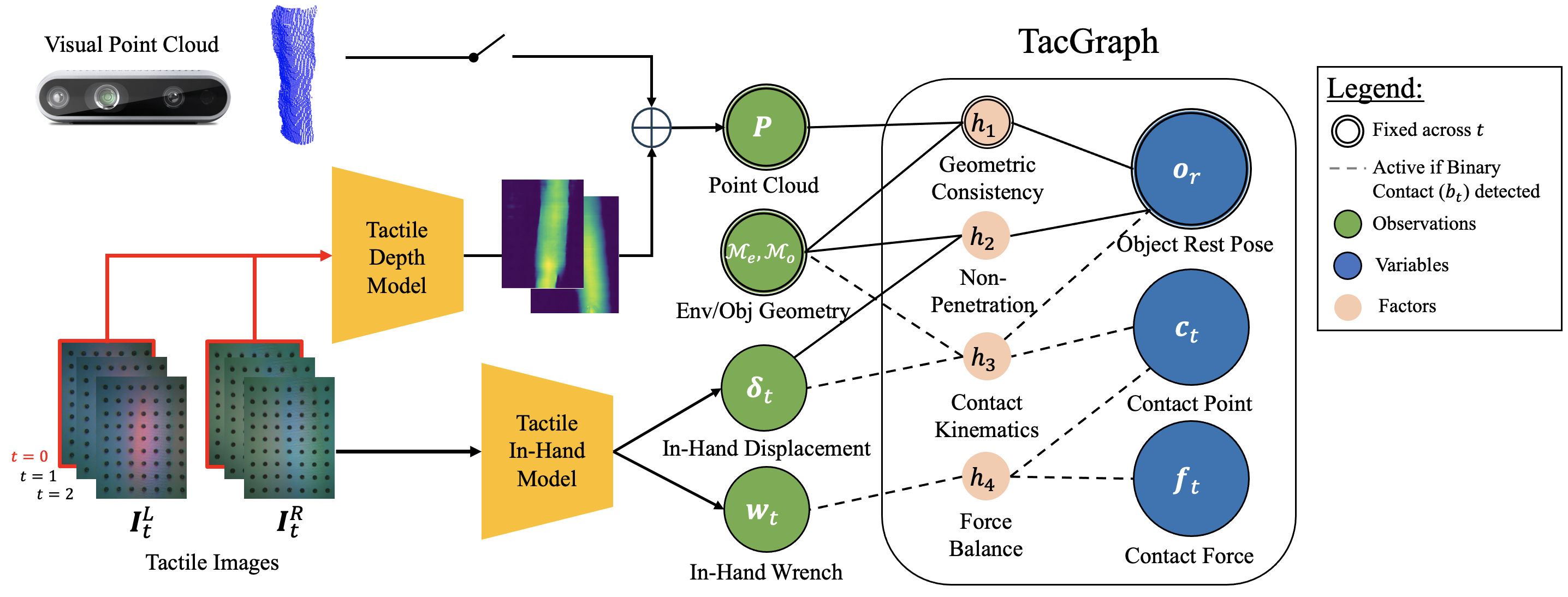
We propose TacGraph - a method for estimating object pose and extrinsic contacts during prehensile manipulation using distributed tactile feedback and (optionally) visual feedback. Our method has two main components. First, we have a series of learned tactile modules. These translate raw tactile signals to useful intermediates (geometry, forces, and displacements). Second, we have a Factor Graph which takes the learned tactile outputs, along with known object/environment geometries and enforce the physical constraints of contact (geometric consistency, non-penetration, contact kinematics, and force balance).